问题背景:
英飞凌官网有提供基于XMC1302的步进电机的demo,但是客户根据官网提供的文档介绍,不知道如何来使得步进电机正常运行。所以我们特意整理了该文档,详细介绍下步进电机例程的完整操作流程。
环境搭建:
1.硬件环境
1)KIT_XMC1300_IFX9201
2)KIT_XMC47_RELAX_5V_AD_V1
3)步进电机
4)PC机一台
5)MiniUSB线一根
2.软件环境
1)或更高版本
(从英飞凌官网下载,下载链接:)
2)

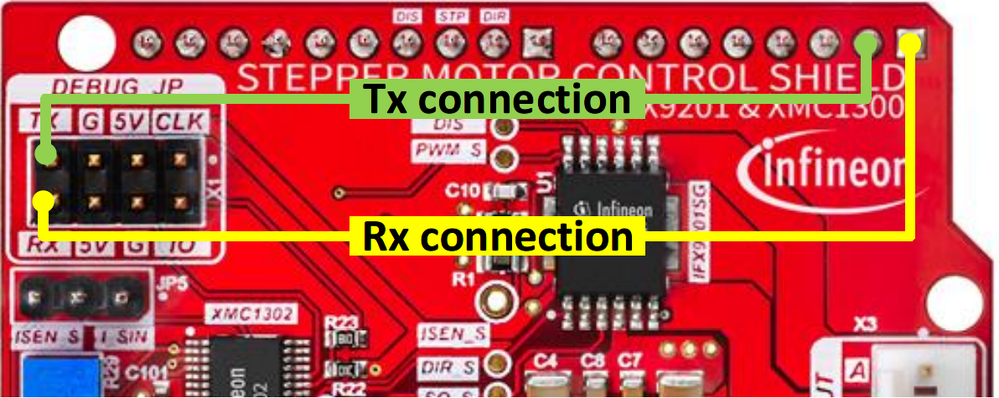
按照下图方式来进行连接,这里的步进电机需要外部电源提供24V的供电,而控制器的5V供电,可以由KIT_XMC47_RELAX_5V_AD_V1来提供。

3.demo工程下载路径
1)XMC工程

2)Arduino程序包

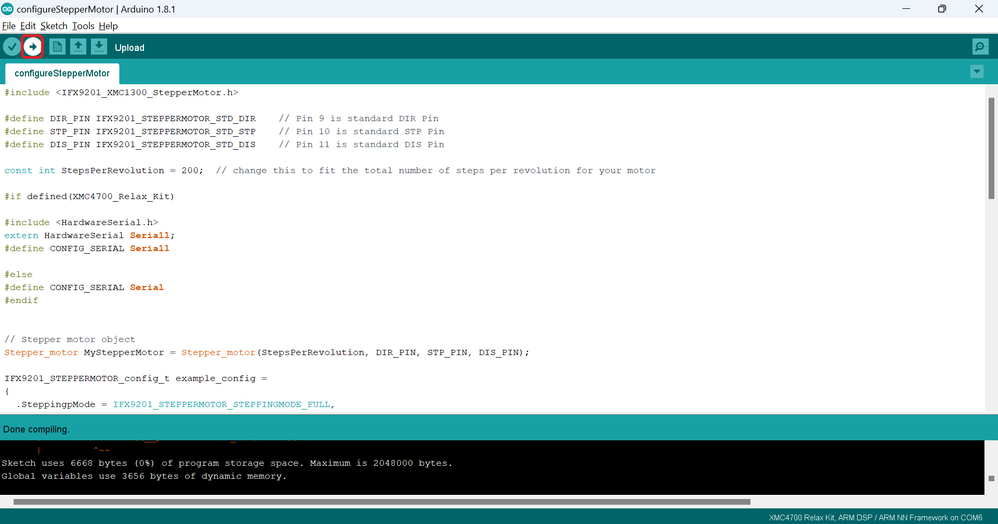
该程序包含configureStepperMotor和testStepperMotor两个主程序。
备注:该步进电机的例程,可以通过Arduino的板子来控制XMC的控制板,从而来控制步进电机进行运行。所以,在运行电机前,KIT_XMC1300_IFX9201的板子要插到KIT_XMC47_RELAX_5V_AD_V1板子上。同时,使用两根导线来连接下图所示的TXRX管脚。
运行步骤
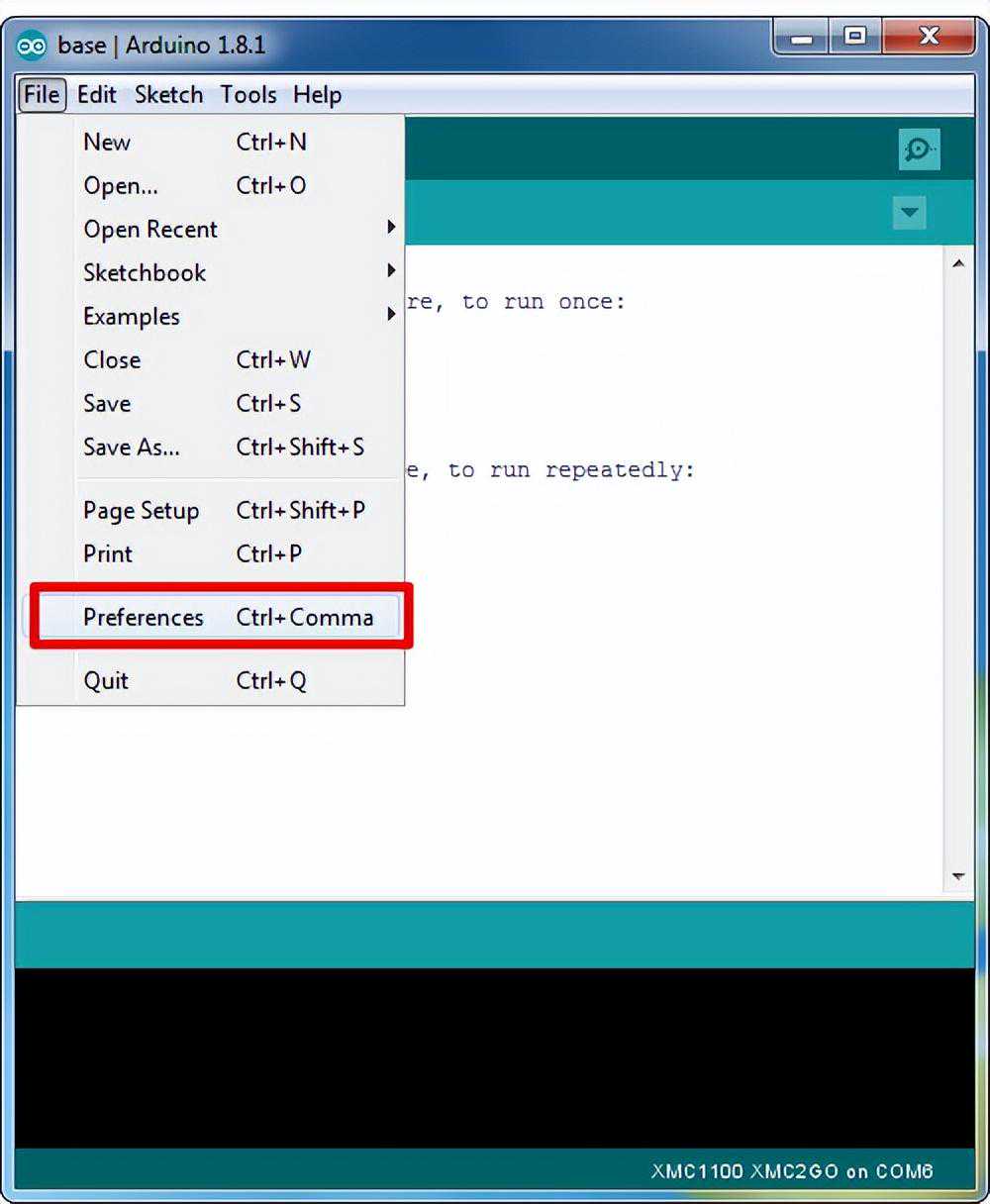
1Arduino相关配置设置
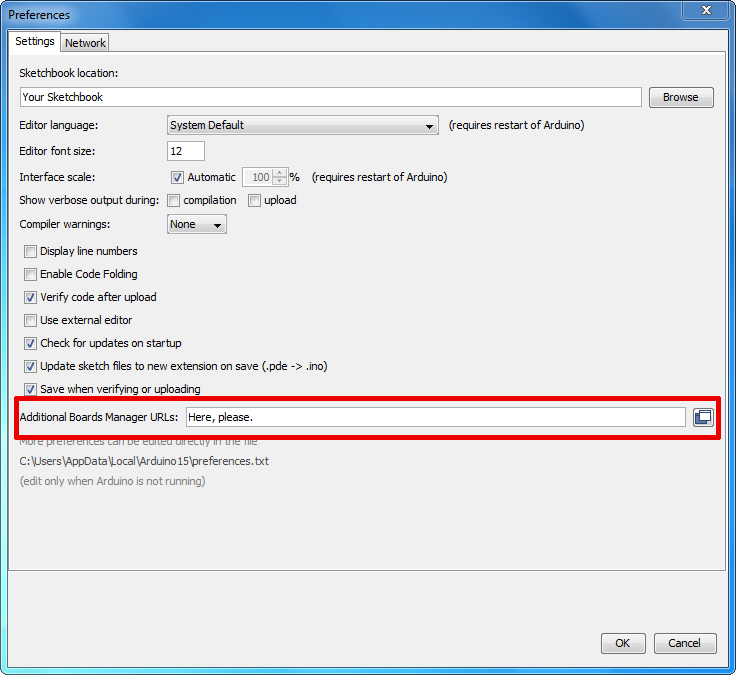
2)复制以下链接到下图红色标记位置

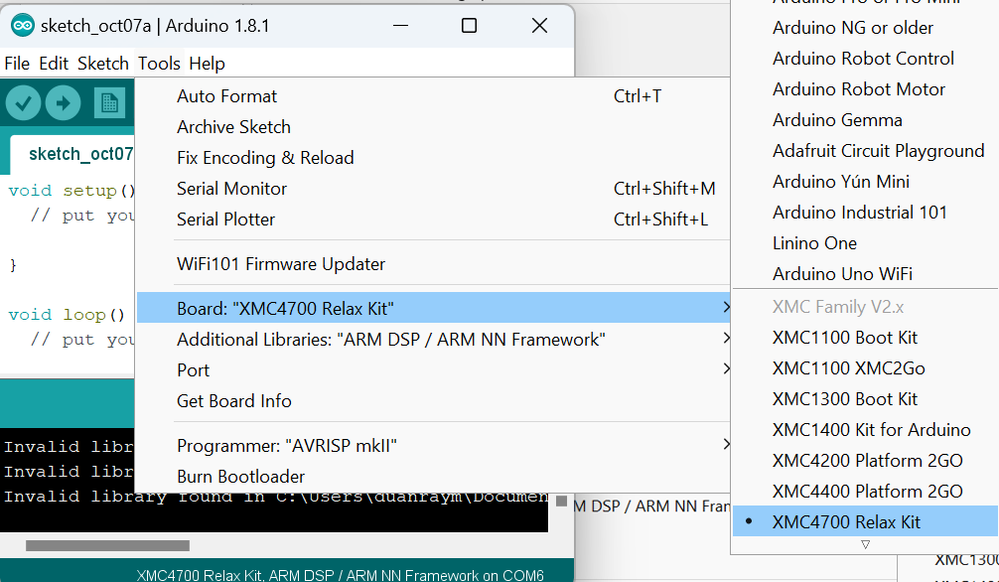
2通过Arduino程序包来控制步进电机
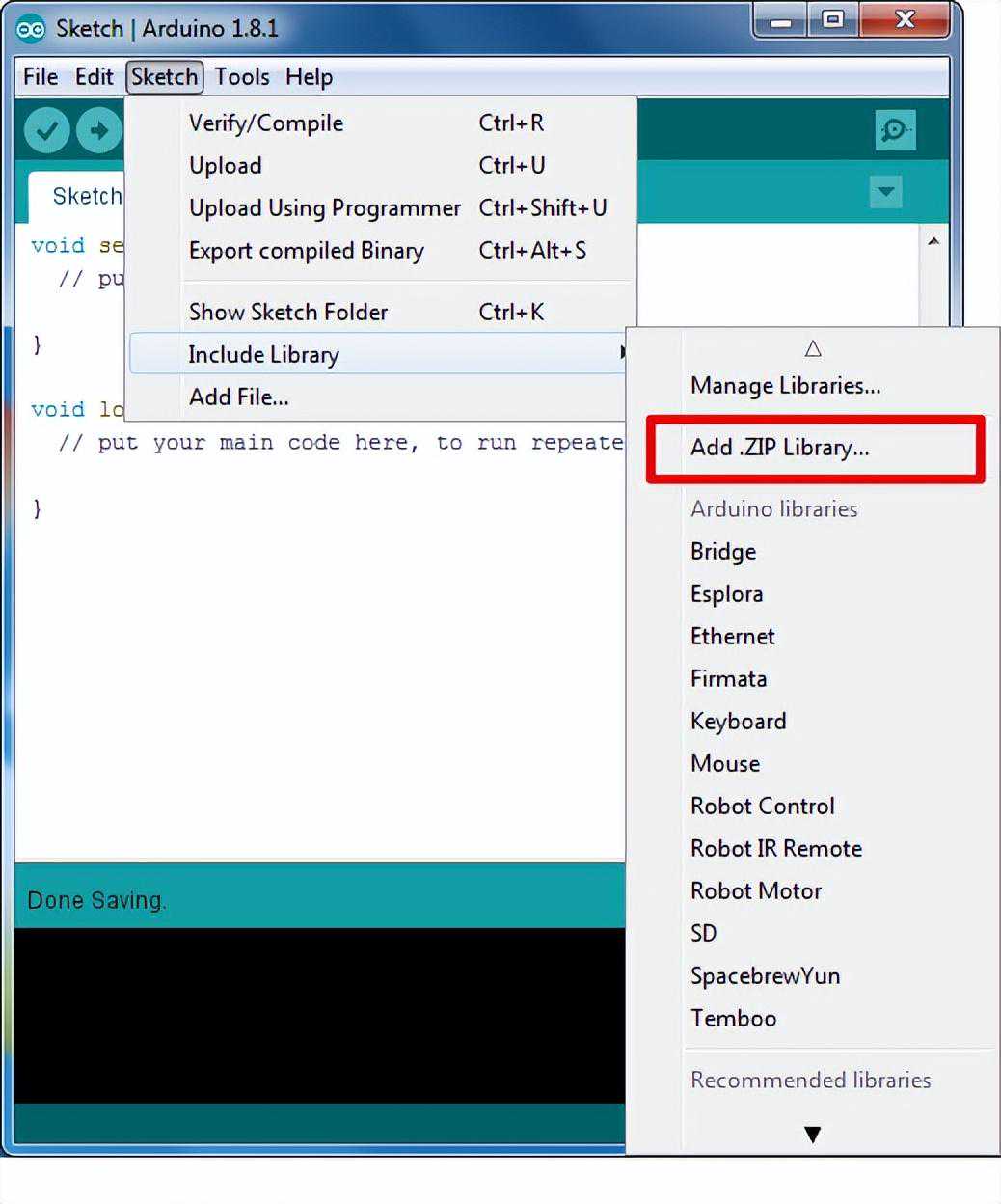
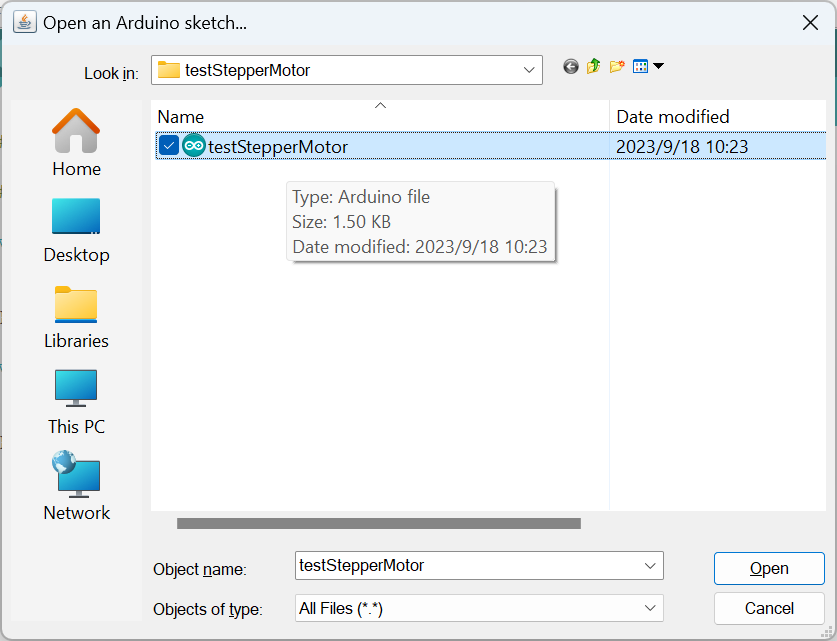
1)安装库,依次点击
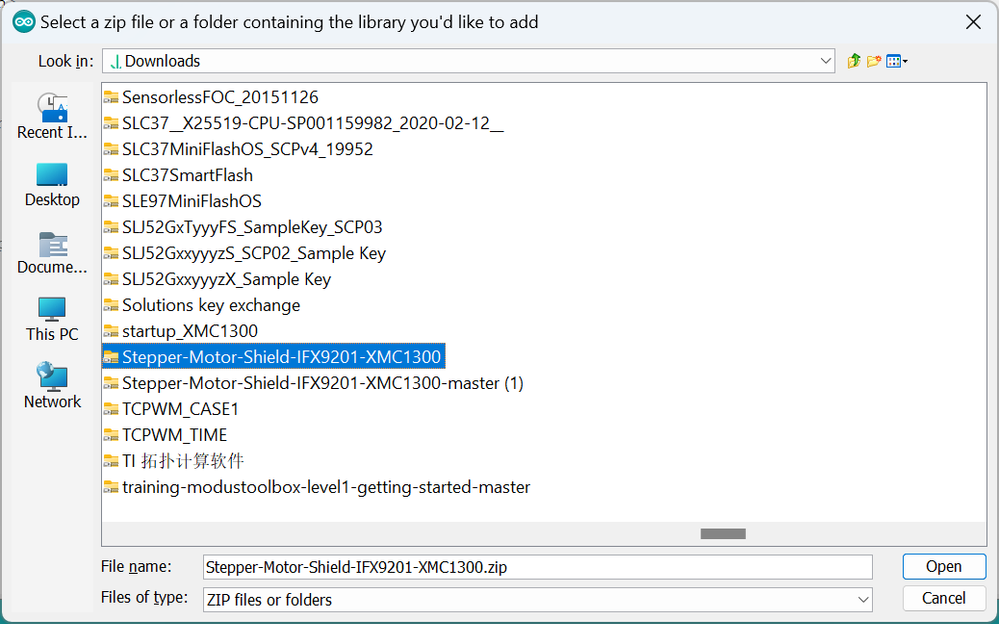
选择刚从github上下载的Arduino的程序包

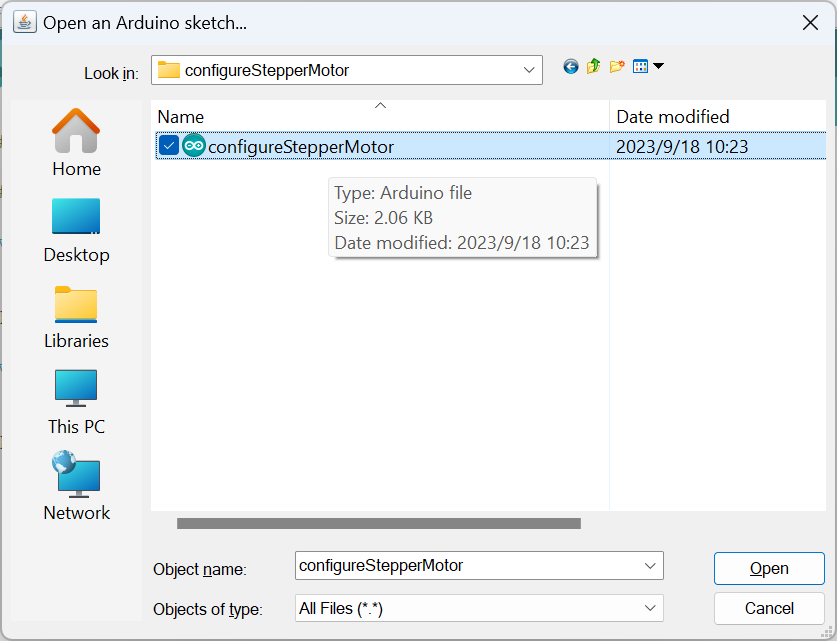
选择configureStepperMotor
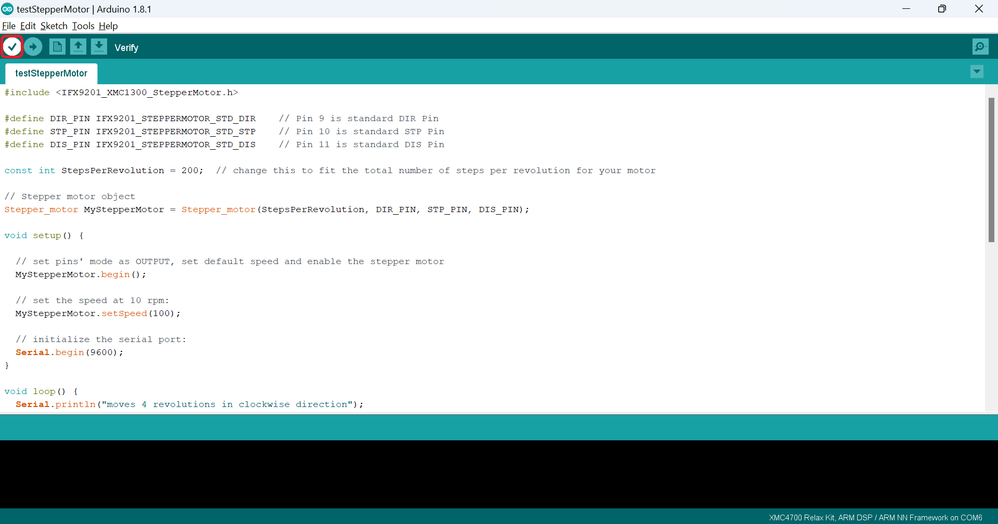
选择testStepperMotor
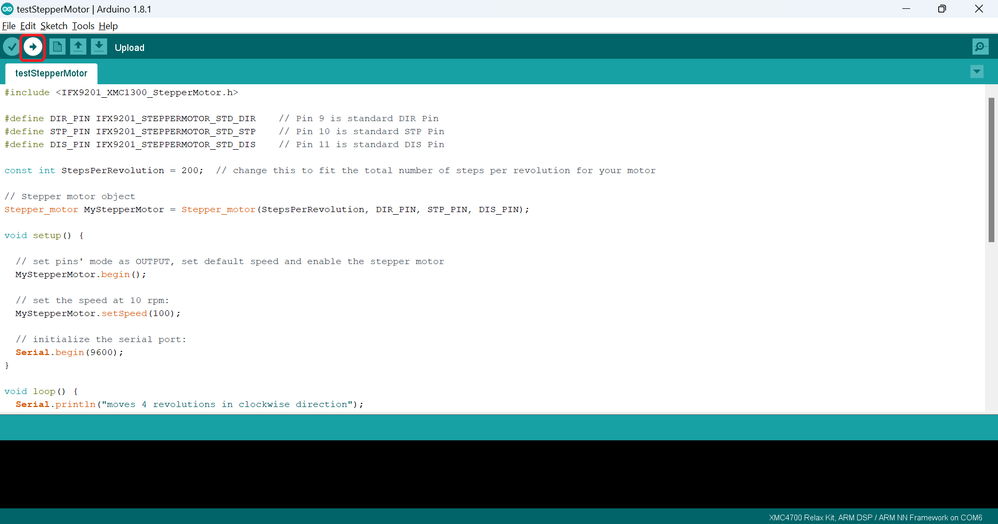
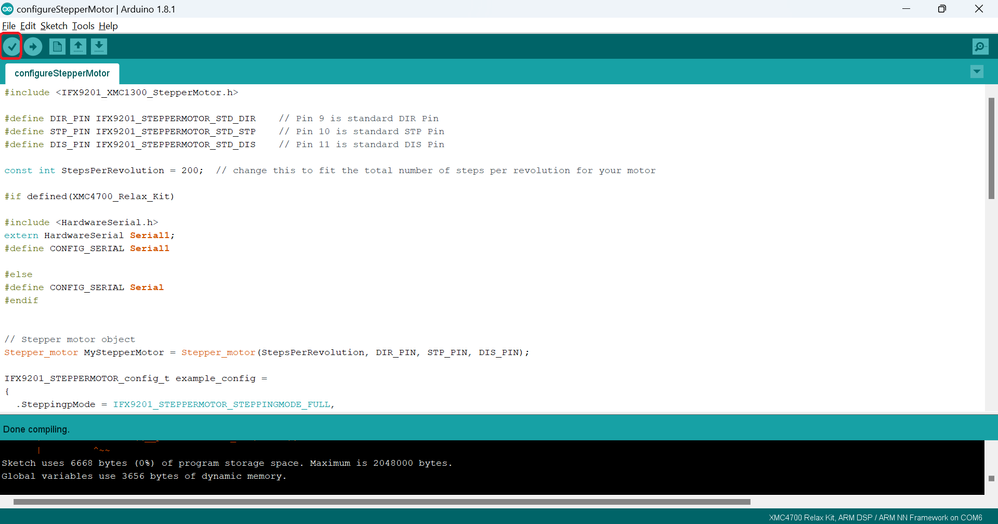
8)通过修改下面黄色标记的部分,来修改步进电机的转速。
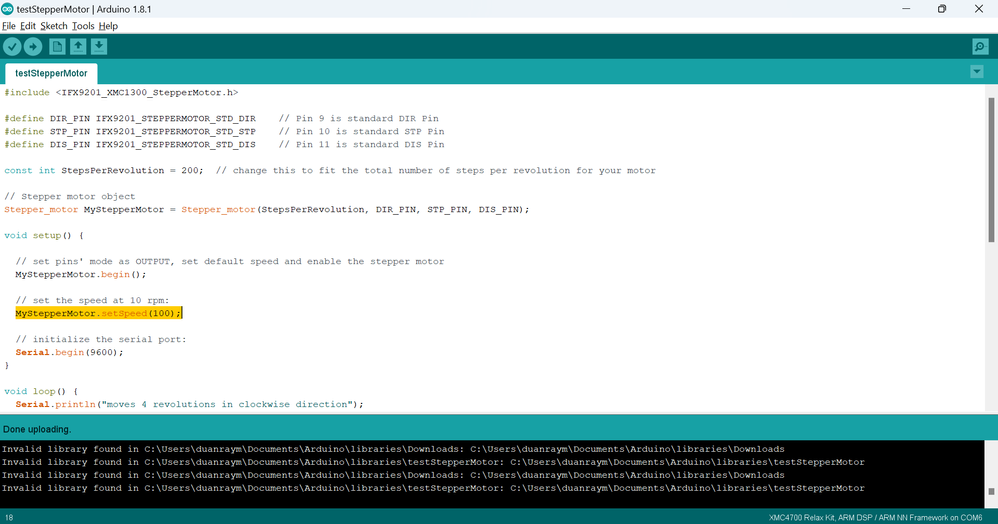
备注:步进电机的转动实际上都是根据驱动器和电机相互匹配的,例如电机转动步进角所需电流大小,驱动器在接收脉冲间隔时是否可以满足该电流以及步进换向的速度。如果脉冲过高导致驱动板切换AB相电流速度过快,对应的步进电机无法做到转动,那么就叫丢步了,表现上可能就是不转或者速度降低。
如果转速是10转/秒,也就是600转/分钟,控制脉冲频率是4KHz,那么该电机的步数就是400步/圈,那么步距角就是0.9°。

找元器件上唯样商城

-

平安再刷新《福布斯》全球2000强榜 今年科技研发或再投超100亿
2025-11-21 -
 2025-02-06
2025-02-06 -
 2025-04-05
2025-04-05 -
 2024-11-08
2024-11-08
-
制冷系统冰堵、脏堵、油堵产生的原因和解决办法
2024-11-11 -
义翘科技独董在外任职或选择性披露 供应商产品召回频发存隐忧
2025-12-30 -
转型升级、胜利在望,恒星科技:快速崛起的金刚石切割线巨头
2025-11-10 -
厉害了!潍坊市人民医院创伤骨科二区运用“超级显微外科技术”完成患者手背缺损修复
2026-01-29