陀螺仪,作为一种用于感测和维持方向的装置,其设计基于角动量守恒的原理。主要由一个位于轴心且可旋转的转子构成,一旦开始旋转,由于转子的角动量,它将抵抗方向的改变。
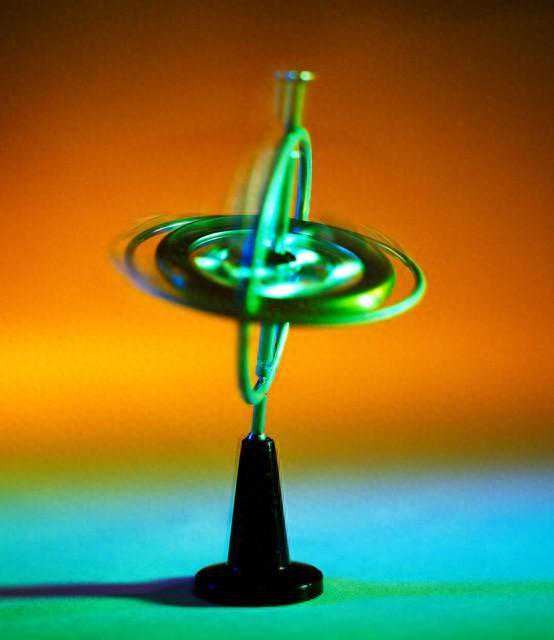
一、陀螺仪的原理
陀螺仪的原理可以通过牛顿第二定律来解释。当物体旋转时,会产生向外的离心力,这个离心力与旋转速度和质量有关。如果旋转物体的轴心不发生改变,那么离心力的方向也不会改变。根据这个原理,陀螺仪的转子被设计成高速旋转的状态,并且转子的轴心被固定在一个方向上。当陀螺仪发生倾斜时,虽然转子的轴心仍然保持不变,但转子的方向发生了改变,这导致了转子产生的离心力方向的改变。陀螺仪的传感器可以检测到这个离心力方向的改变,并将其转化为电信号输出。
二、陀螺仪的发展和应用
陀螺仪的发展历史可以追溯到古代。最早的陀螺仪是一种机械装置,被称为“陀螺仪”,它由一个高速旋转的转子和一个支架组成。早在19世纪,陀螺仪就被用于导航和船舶稳定等领域。
随着电子技术的发展,电子陀螺仪开始出现。20世纪40年代,德国科学家海因里希·施密特发明了第一台电子陀螺仪,它使用了一个高速旋转的转子和一个电磁传感器来检测转子的旋转速度和方向。
在20世纪60年代和70年代,随着集成电路技术的发展,电子陀螺仪的性能得到了大幅提高。同时,随着计算机技术的发展,陀螺仪开始被广泛应用于惯性导航、航空航天、军事和民用领域。
在20世纪90年代,MEMS(微机电系统)技术的发展使得微型陀螺仪得以实现。MEMS陀螺仪具有体积小、重量轻、成本低等优点,被广泛应用于消费电子、汽车、无人机等领域。
近年来,随着人工智能和物联网技术的发展,陀螺仪的应用领域不断扩展。例如,在智能手机中,陀螺仪可以用于实现手势识别、虚拟现实等功能;在智能家居中,陀螺仪可以用于实现智能门锁、智能窗帘等智能控制。

-
 2024-11-08
2024-11-08 -
 2024-11-10
2024-11-10 -
 2025-12-07
2025-12-07 -
不容错过
-
通知|省科技厅关于认定2023年度广东省工程技术研究中心
2025-11-04 -
GH1333高温合金板材性能百科
2025-04-26 -
揭秘激光雷达的“硬科技”,探寻新兴技术的进化方向
2025-09-28 -
115 机械臂加工切割辅助半自动排程系统-09
2025-04-04
友情链接