以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
SubmittedtoICRA2024|一种应用于水下里程计的在线自校准折射相机模型
【AnOnlineSelf-calibratingRefractiveCameraModelwithApplicationtoUnderwaterOdometry】
开源数据集:GitHub-ntnu-arl/underwater-datasets:Underwater
文章链接:挪威科技大学(NTNU)
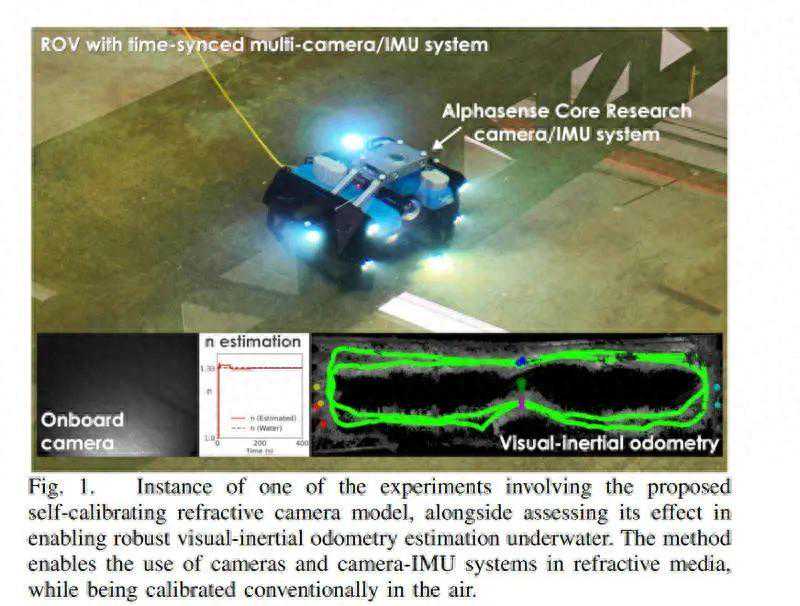
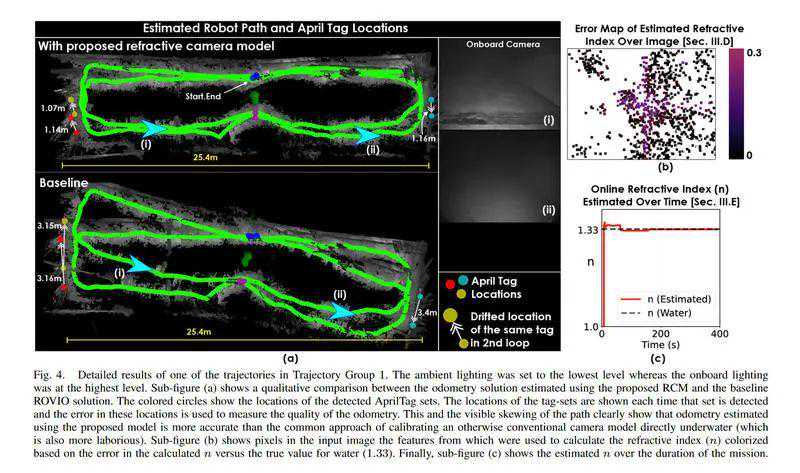
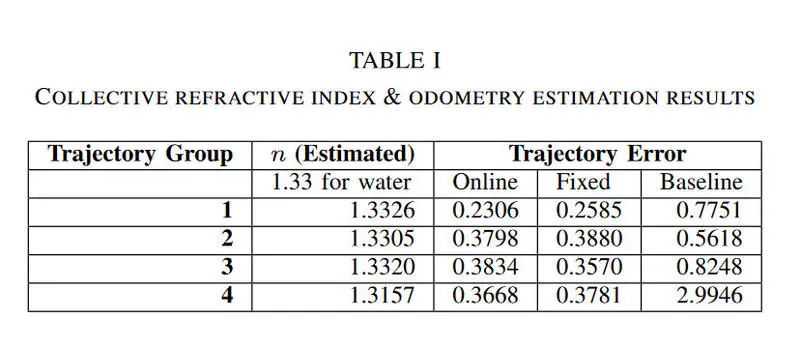
本文提出了一种适用于水等折射介质的相机模型及其在水下视觉惯性里程计中的应用。该模型是实时自校准的,不需要已知的对应关系或校准目标。它可分为畸变模型(依赖于折射率n和径向像素坐标)和虚拟针孔模型(作为n的函数)。我们推导了利用极线约束的自校准公式来估计折射率,然后对畸变进行校正。
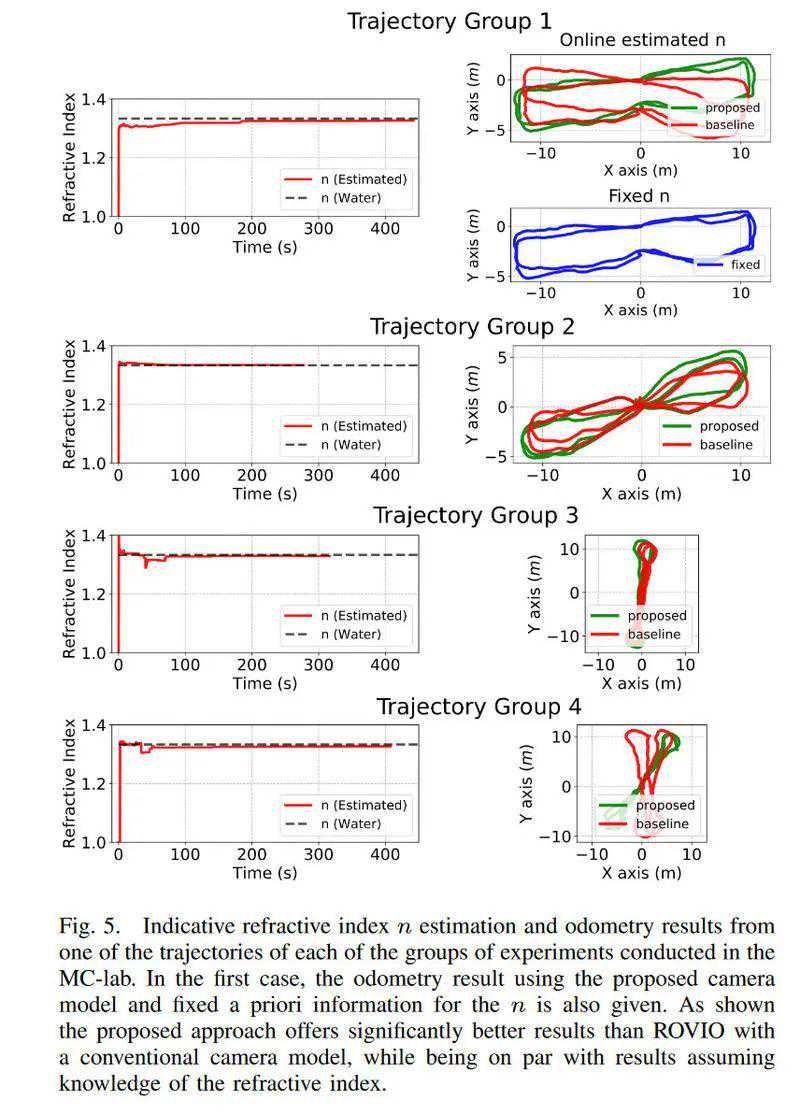
通过使用集成相机和惯性传感的水下机器人进行实验研究,验证了该模型对折射率的准确估计及其在扩展包络条件下对鲁棒里程计估计的好处。最后,我们展示了介质之间的转换和折射率变化的在线估计,从而允许跨越折射率介质的计算机视觉任务。


以上内容来自小六的机器人SLAM学习圈知识星球每日更新内容
推荐阅读
深度学习特征提取匹配开源算法:SuperPoint和SuperGlue
3DGaussianSplatting为什么牛啵?原理、应用场景及最新进展

-

徐庄高新技术产业开发区南京听说科技有限公司工会第二次会员代表大会胜利召开
2026-01-30 -
 2024-12-29
2024-12-29 -

-
 2025-12-15
2025-12-15
不容错过
-
废旧变压器不要丢,稍加改造,立马变成一个充电神器,太实用了
2025-01-07 -
中核科技:公司主要业务为工业用阀门的研发、生产、销售及服务
2025-12-03 -
科技助听,共享美好生活——2024年“爱耳日”义诊活动圆满结束
2025-10-17 -
保温装饰一体板系统中「耐候胶」如何“搞事情”?
2025-02-10
友情链接